
I recently decided to change the tires on my car to Michelin 215/45ZR-17 MICHELIN PILOT SPORT 4S because the original size 205 was not in stock anywhere. After more research, I think size 215 will look better. However, the downside of this is that the diameter of that tire is 0.3″ bigger, which will cause incorrect odometer counting. Here is the calculation using the Miata.net calculator:
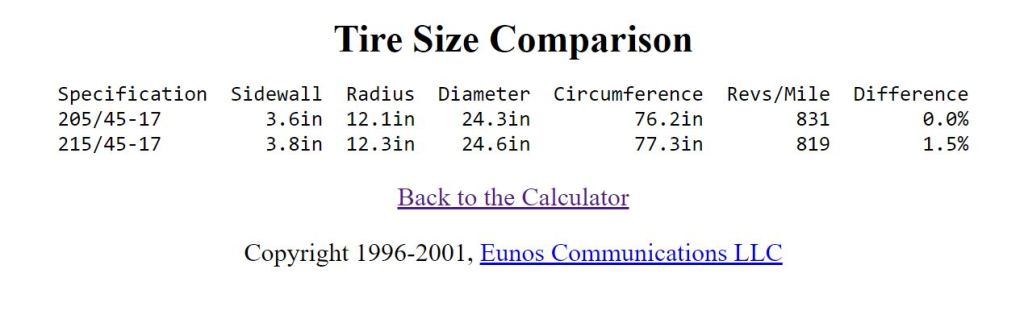
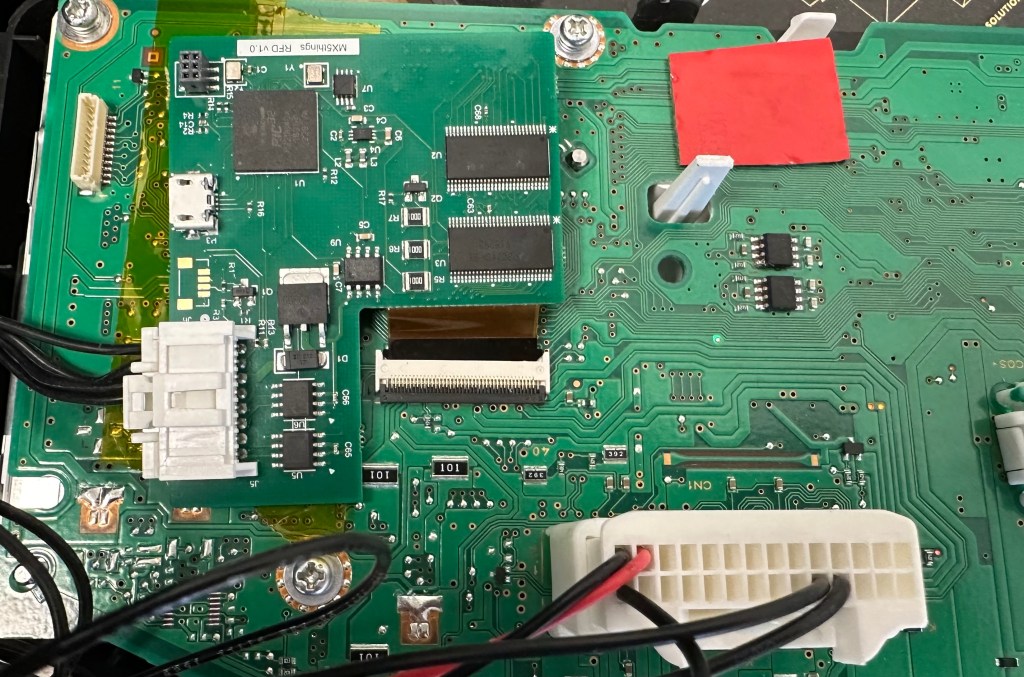
This means that the speedometer will show 60mph, while the actual speed is 60.9mph and the odometer will show a lower value over time (150miles less for every 10,000). It is not a big deal, but for sake of accuracy, I decided to correct this with one of my devices. In the Mazda MX-5, the Instrument Cluster gets information about speed via CAN bus, from message ID 0x202. I used these messages for my digital speedometer implementation. So, to correct the speed information all we need is to intercept this CAN message and recalculate in real-time, according to the Tire Size Calculator. My RF roof controller is basically doing the same thing with speed info, to override the default speed limit of 6mph. I can reuse the same hardware design for correcting speed in the Instrument Cluster. All that’s needed is a new plug-n-play harness attached between the Instrument Cluster and the main harness. I think this device will be useful for people who want to/or have changed wheels size or any non-OEM size tires.






You must be logged in to post a comment.