One of the most popular modifications for MX-5 RF is adding the “SmartTop” module made by mods4cars. This is a very simple electronic device, but it cost over $300, I think because there is no competition. I decided to design and produce my own version of such a device. Basically, it is just a CAN bus bridge, which can filter can messages, to trick the roof mechanism by blocking messages which will disable operation (like higher speed, car in reverse, etc). My previous project for the front camera kit has a similar design, so it was easy to reuse it for this project.
Implementing a one-touch feature is very simple as well, because the roof control switch produces only two voltage levels, to keep the roof opening or closing.
Another idea for this device is to be able to control the roof using the key fob like it is done in BMW Z4 for example. So you open the roof while approaching the car. This is quite a challenging task because the roof mechanism operates only when Ignition power is on and other modules on the CAN bus operational. I’m hoping to override these limitations by integrating the IG power switch for the roof controller in my device and substitute the CAN messages for initial communication.
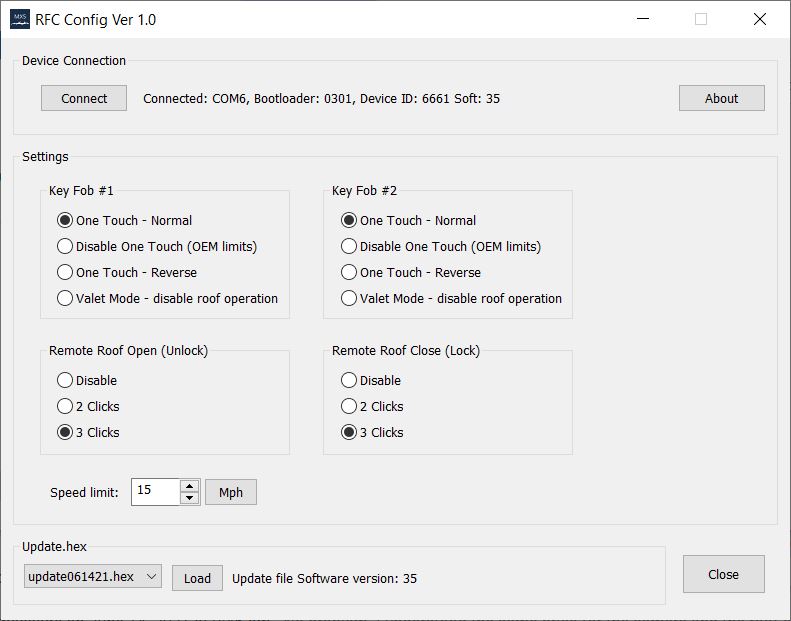
My first version of this device now operational for all basic features. The software can be updated at any time via USB cable. To do this, my son made for me a Windows application.
Because I have to have communication with Key Fob, I found that it would be useful to have different configurations assigned for each key fob. If you need to give the car to someone else, you can share a key that has disabled the new feature, to avoid confusion at the service center for example. Or for valet parking, you can share the key with completely disabled roof control, so they can’t play with this feature.
Hardware installation will be exactly the same as for “SmartTop”, YouTube has tons of videos on how to do this.
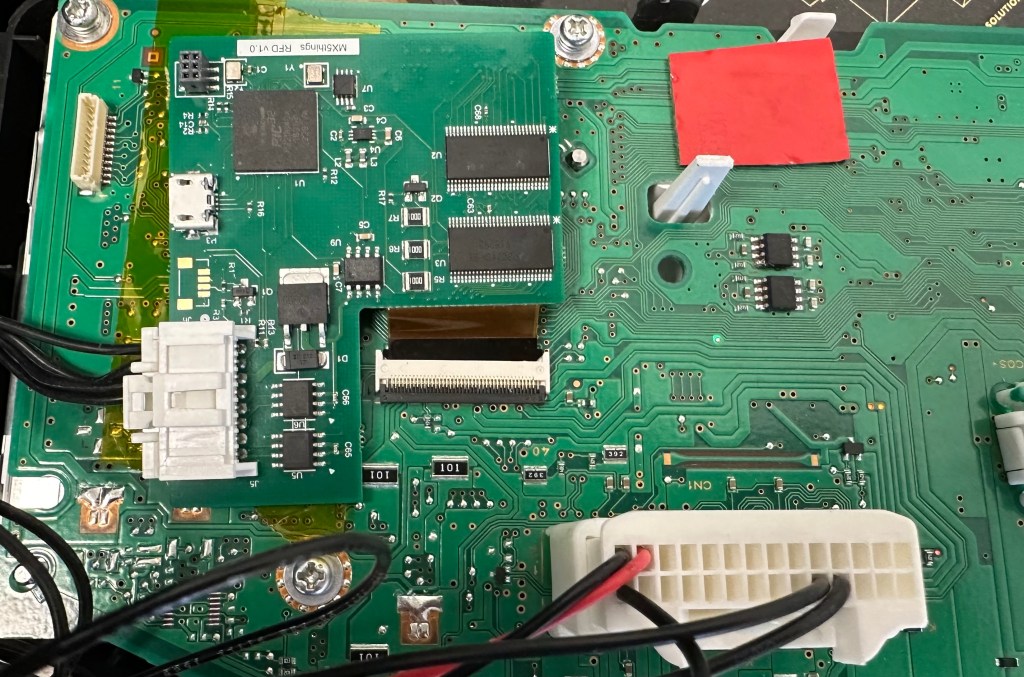
The module it self 50mm x 59mm x 18mm. It has a Micro USB connector for programming, LED status and a 16 pin connector for the main harness, similar to “SmartTop” is using. This device with a harness will be available in my store for $159.










You must be logged in to post a comment.